Mathematical definitions
Notations and basic modeling
Notations
First, let us define main quantities of interest involved in EPR imaging in the continuous setting (we shall use the superscript ‘\(c\)’ to designate continuous signals and differentiate them from their discrete counterparts). For the sake of simplicity, we consider that the sample to be imaged is made of a single paramagnetic species X (more specific notations will be introduced when dealing with multiple EPR sources). Let
\(h_X^c : \mathbb{R} \to \mathbb{R}\) be the reference spectrum (also known as zero-gradient spectrum) of the paramagnetic species X;
\(U_X^c : \mathbb{R}^d \to \mathbb{R}\) be the concentration mapping of the paramagnetic species X (where \(d \in \{2,3\}\) denotes the dimension of the spatial domain).
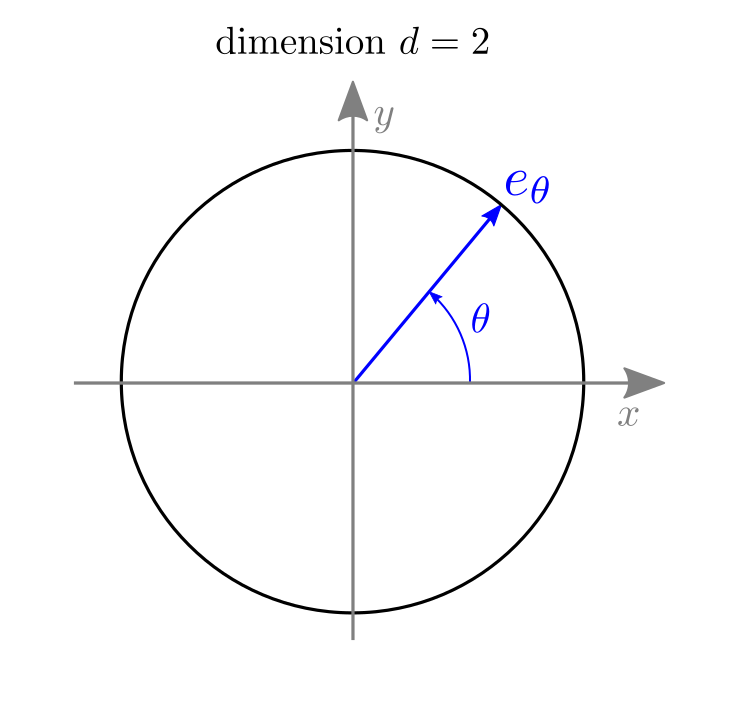
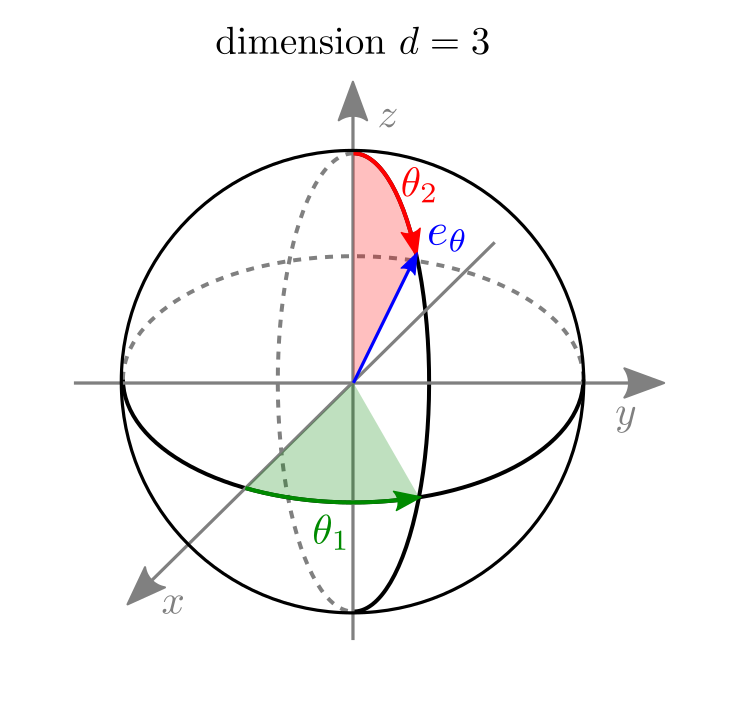
Now, let us consider that a field gradient \(\gamma \in \mathbb{R}^d\) is applied inside the EPR resonator. Let \(\mu = \|\gamma\| \in \mathbb{R}_+\) be the magnitude of the field gradient, and let us denote by \(e_\theta \in \mathbb{R}^d\) the unit vector of the sphere such that
\[\gamma = \mu \cdot e_\theta \,.\]
The parameter \(\theta\in\mathbb{R}^{d-1}\) is an angular parameter that characterizes the orientation \(e_\theta\) of the field gradient \(\gamma\). In practice, when \(d=2\), the parameter \(\theta \in \mathbb{R}\) corresponds to the angle of the polar coordinate system, and when \(d=3\), the parameter \(\theta = (\theta_1, \theta_2) \in \mathbb{R}^2\) is made of the longitudinal (\(\theta_1\)) and latitudinal (\(\theta_2\)) angles of the spherical coordinate system.
Notice that, in this modeling, the continuous signals \(h_X^c\) and \(U_X^c\) were extended by zero outside from their actual supports (leading to a signal \(h_X^c\) defined over \(\mathbb{R}\) and a signal \(U_X^c\) defined over \(\mathbb{R}^d\)) in order to facilitate their continuous description using standard operators (convolution, Fourier transform, Radon transform, etc.). The domains of those signals will be restricted back to a finite domain when we will define their discrete counterparts.
Radon transform
In the following, we will denote by \(\mathcal{R}_\theta(U_X^c) : \mathbb{R}\to \mathbb{R}\) the Radon transform of \(U_X^c\) in the direction \(e_\theta\), which is defined by
(1)\[\forall r \in \mathbb{R}\,,\quad \mathcal{R}_\theta(U_X^c)(r) = \int_{\mathrm{Span(e_\theta)^\perp}} U_X^c(r e_\theta + s) \, \mathrm{d}s = \int_{\mathbb{R}^d} U_X^c(x) \, \delta_*(\langle x, e_\theta \rangle - r) \, \mathrm{d}x\,,\]
where \(\langle \cdot, \cdot \rangle\) denotes the canonical inner product in \(\mathbb{R}^d\) and \(\delta_*(\cdot)\) denotes the Dirac mass. The Radon transform is at the core of the modeling of EPR imaging, as we shall see below.
Projections and sinograms
An EPR projection corresponds to the mono-dimensional signal \(\mathcal{P}_{X,\gamma}^c : \mathbb{R} \to \mathbb{R}\), acquired when ramping up the intensity \(B \in \mathbb{R}\) of the homogeneous magnetic field applied to the paramagnetic sample (in presence of a field gradient \(\gamma\)). An EPR projection can be linked to the reference spectrum \(h_X^c\) of the EPR species contained in the sample and its concentration mapping \(U_X^c\) through the relation
(2)\[\forall B \in \mathbb{R}\,,\quad \mathcal{P}_{X,\gamma}^{c}(B) = \big(h_X^c * \mathcal{R}_\theta^{\mu}(U_X^c)\big)(B) := \int_{\mathbb{R}} h_X^c(B') \cdot \mathcal{R}_\theta^\mu(U_X^c)(B-B') \, \mathrm{d}B'\,,\]
where \(*\) denotes the convolution operator and \(\mathcal{R}_\theta^\mu(U_X^c)\) denotes the dilatation of the Radon transform of \(U_X^c\) by the factor \(-\mu\) (recall that \(\mu = \|\gamma\|\) represents the magnitude of the field gradient \(\gamma\)), which is defined by
(3)\[\forall B \in \mathbb{R}\,,\quad \mathcal{R}_\theta^\mu(U_X^c)(B) = \frac{1}{\mu} \cdot \mathcal{R}_\theta(U_X^c)(-B/\mu)\,.\]
An EPR sinogram simply corresponds to the aggregation of multiple projections, acquired for different values of field gradient \(\gamma\) (i.e., different values of orientation \(e_\theta\) or/and magnitude \(\mu\)). Given a sequence \(\Gamma = (\gamma_1, \gamma_2, \dots, \gamma_N) \in (\mathbb{R}^d)^N\) made of \(N\) magnetic field gradient vectors, a sinogram \(\mathcal{S}_{\Gamma}^c\) can be defined as
(4)\[\forall B \in \mathbb{R} \,,\quad \mathcal{S}_{X,\Gamma}^c(B) = \big( \mathcal{P}_{X,\gamma_1}^c(B), \mathcal{P}_{X,\gamma_2}^c(B), \dots, \mathcal{P}_{X,\gamma_N}^c(B) \big)\,.\]
In most commercial EPR-imagers, a sinogram corresponds to the acquisition of multiple projections with a fixed field gradient intensity \(\mu\) and multiple field gradient orientations \(e_\theta\). However, we will not limit to this particular situation and consider that a sinogram can gather projections acquired with different field gradient \(\gamma\), without any supplementary assumption.
Discretization
In practice, the acquired spectra, projections and the images that we reconstruct are discrete signals with finite number of samples. We shall explain now how those signals can be linked to their continuous counterparts. In the next sections, we will focus on the definitions of the discrete projection / backprojection operators implemented in the PyEPRI package.
First, let us introduce a generic (and useful) notation to refer to the domain of the discrete signals. For any integer \(K>0\) (representing a number of sample), we denote by \(I_K\) the set of \(K\) consecutive integers centered at 0, defined by
(5)\[I_K = \left[-\frac{K}{2}, \frac{K}{2}\right) \cap \mathbb{Z} = -\left\lfloor \frac{K}{2} \right\rfloor + \bigg\{0, 1, \dots, K-1\bigg\},\]
where \(\lfloor \cdot \rfloor\) denotes the lower integer part operator.
In practice, EPR spectra and projections are not acquired for all \(B \in \mathbb{R}\) but over a bounded acquisition range of homogeneous magnetic field intensity,
(6)\[B \in B_{cf} + \left[- \frac{B_{sw}}{2} \,,\, \frac{B_{sw}}{2} \right],\]
where \(B_{cf} \in \mathbb{R}\) and \(B_{sw} \in \mathbb{R}_+\) are called the center-field and the sweep-width and respectively represent the center and the length of this acquisition range. During an EPR experiment, we consider that all acquired projections share the same acquisition range defined by (6). Real-life acquisitions are made for a finite number of samples of homogeneous magnetic field intensities in the acquisition range. We will assume those samples to be regularly spaced. Let us denote by \(N_B\) the number of samples, the homogeneous magnetic field intensity nodes are the \(\{B_m\}_{m \in I_{N_B}}\) defined by
(7)\[\forall m \in I_{N_B}, \quad B_m = B_{cf} + m \cdot \delta_B\,.\]
where \(\delta_B = \tfrac{B_{sw}}{N_B}\) represents the sampling step of the homogeneous magnetic field intensity.
Accurate sampling always come after an appropriate filtering and we will place ourselves in this setting (see more details in [ABDF23]). For that purpose, we introduce below the filtered reference spectrum \(\widetilde{h_X^c}: \mathbb{R} \to \mathbb{R}\) and projection \(\widetilde{\mathcal{P}_{X,\gamma}^c}\) defined by
(8)\[\widetilde{h_X^c} = g_{\delta_B} * h_X^c \quad \text{and} \quad \widetilde{\mathcal{P}_{X,\gamma}^c} = g_{\delta_B} * \mathcal{P}_{X,\gamma}^c\,,\]
where \(g_{\delta_B}\) is the cut-band filter defined through its Fourier transform
(9)\[\begin{split}\forall \xi \in \mathbb{R}\,,\quad \mathcal{F}(g_{\delta_B}) = \int_{\mathbb{R}} g_{\delta_B}(B) \, e^{-i B\xi} \, \mathrm{d}B = \left\{\begin{array}{cl}1 & \text{if } |\xi| \leq \frac{\pi}{\delta_B}\\ 0 & \text{otherwise.}\end{array}\right.\end{split}\]
A direct consequence from (8) is that the Fourier transform of the filtered signal \(\widetilde{h_X^c}\) (respectively \(\widetilde{\mathcal{P}_{X,\gamma}^c}\)) coincides with that of \(h_X^c\) (respectively \({\mathcal{P}_{X,\gamma}^c}\)) over the frequency domain \(\left[-\frac{\pi}{\delta_B}, \frac{\pi}{\delta_B}\right]\) and is zero outside from this domain. In practice, the fast decrease of the Fourier transforms of \(h_X^c\) and \(\mathcal{P}_{X,\gamma}^c\) (both quickly fall below the noise level) allows to consider that \(\widetilde{h_{X}^c} \approx h_{X}^c\) and \(\widetilde{\mathcal{P}_{X,\gamma}^c} \approx \mathcal{P}_{X,\gamma}^c\) and as long as the sampling step \(\delta_B\) is small enough.
Now we are ready to define the discrete counterparts of the continuous signals \(h_X^c\) and \(\mathcal{P}_{X,\gamma}^c\) (projection acquired in presence of a field gradient \(\gamma\)). We will denote those counterparts by \(h_X^\mathrm{d} : I_{N_B} \mapsto \mathbb{R}\) and \(p_{X,\gamma} : I_{N_B} \mapsto \mathbb{R}\). Those discrete and finite signals are defined by
(10)\[\forall m \in I_{N_B}\,,\quad h_X(m) = \widetilde{h_X^c}(B_m) \quad \text{and} \quad p_{X,\gamma}(m) = \widetilde{\mathcal{P}_{X,\gamma}^c}(B_m)\,.\]
We shall introduce now the sampling of \(U_X^c\) over a regular grid. Let \(\delta > 0\) be a spatial sampling step (this spatial sampling step is common to all coordinate axes of the image and will be in practice set by the user of image reconstruction algorithms). Again, we need to introduce the filtering of the image \(U_X^c\) into \(\widetilde{U_X^c} = f_\delta * U_X^c\) where the cut-band filter \(f_\delta\) is defined through its Fourier transform by
(11)\[\begin{split}\forall \xi \in \mathbb{R}^d\,,\quad \mathcal{F}(f_\delta)(\xi) = \int_{\mathbb{R}^d} f_\delta(x) \, e^{-i \langle x, \xi \rangle} \, \mathrm{d} x = \left\{\begin{array}{cl}1 &\text{if } \|\xi\| \leq \frac{\pi}{\delta}\\ 0 &\text{otherwise.}\end{array}\right.\end{split}\]
Now, let \((N_i)_{1 \leq i \leq d}\) be the numbers of samples along the \(d\) coordinate axes of the sampled image, let \(\Omega = I_{N_1} \times \dots \times I_{N_d}\), and let \(u_X : \Omega \to \mathbb{R}\) be the discrete image defined by
(12)\[\forall k \in \Omega\,,\quad u_X(k) = \widetilde{U_X^c}(k \delta)\,.\]
Before going further, let us recall the definition of the discrete Fourier transform of a (mono-dimensional) discrete signal. Given any discrete signal \(v : I_{N_B} \to \mathbb{R}\), we call discrete Fourier transform of \(v\) the (\(N_B\)-periodical) discrete and complex signal \(\mathrm{DFT}(v) : \mathbb{Z} \to \mathbb{C}\) defined by
(13)\[\forall \alpha \in \mathbb{Z}\,,\quad \mathrm{DFT}(v)(\alpha) = \sum_{m \in I_{N_B}} v(m) \, e^{-2 i \pi m \alpha/N_B}\,.\]
The \(\mathrm{DFT}\) operator is invertible and we shall denote by \(\mathrm{IDFT}\) its inverse. The \(\mathrm{DFT}\) and \(\mathrm{IDFT}\) operators can be efficiently evaluated using the Fast Fourier Transform (FFT) Algorithm, in particular, using the Fastest Fourier Transform in the West (FFTW) library.
The notion of discrete Fourier transform can be extended to define the nonuniform discrete Fourier transform of a (\(d\)-dimensional) discrete signal. Given any discrete signal \(v : \Omega \to \mathbb{R}\), we call nonuniform discrete Fourier transform of \(v\) the complex signal \(\mathrm{NDFT}(v) : \mathbb{R}^d \to \mathbb{C}\) defined by
(14)\[\forall \omega \in\mathbb{R}^d\,,\quad \mathrm{NDFT}(v)(\omega) = \sum_{k \in \Omega} v(k) \, e^{-i \langle k , \omega \rangle}.\]
The PyEPRI package relies on the Flatiron Institute Nonuniform Fast Fourier Transform (FINUFFT) library for the fast and accurate evaluation of the \(\mathrm{NDFT}\) operator over any sequence \(\omega = (\omega_1, \omega_2, \dots, \omega_M) \in (\mathbb{R}^d)^M\) made of \(M\) nonuniform frequency nodes (see [Bar21, BMaK19, SWA+21]).
Last, for any field gradient vector \(\gamma\in\mathbb{R}^d\), let us define the set
(15)\[C_{\delta, \delta_B}^{N_B}(\gamma) = \left\{\alpha \in \mathbb{Z}\,,\quad \|\alpha \, \gamma \| < \frac{N_B \delta_B}{2 \delta} \text{ and } | \alpha | < \frac{N_B}{2}\right\}\,.\]
Under several assumptions (see more details in [ABDF23]) we can derive the following approximation between the discrete Fourier coefficients of the discrete projection \(p_\gamma\), those of the discrete reference spectrum \(h_X\), and some nonuniform discrete Fourier coefficients of the discrete image \(u_X\), that is, for all \(\alpha \in I_{N_B}\),
(16)\[\begin{split}% \mathrm{DFT}(p_{X,\gamma})(\alpha) \approx \mathrm{DFT}(h_X)(\alpha) \cdot \left\{ % \begin{array}{cl} % \delta^d \cdot \mathrm{NDFT}(u_X)\left(-\frac{2 \pi \alpha \delta}{N_B \delta_B} \, \gamma\right) & \text{if } \alpha \in \mathcal{C}_{\delta, \delta_B}^{N_B}(\gamma) \\ % 0 & \text{otherwise.} % \end{array} \right.\end{split}\]
We are now ready to formally define the projection operator implemented in the PyEPRI package.
Single source operators
Projection operator
Neglecting the modeling and approximation errors involved in (16), we get
(17)\[p_{X,\gamma} = A_{X,\gamma}(u_X)\]
where \(A_{X,\gamma} (u_X)\) is defined through its discrete Fourier coefficients by setting, for all \(\alpha\in I_{N_B}\),
(18)\[\begin{split}\mathrm{DFT}(A_{X,\gamma}(u_X))(\alpha) = \mathrm{DFT}(h_X)(\alpha) \!\cdot\! \left\{ % \begin{array}{cl} % \delta^d \!\cdot\! \mathrm{NDFT}(u_X)\left(-\frac{2 \pi \alpha \delta}{N_B \delta_B} \, \gamma\right) & \text{if } \alpha \in \mathcal{C}_{\delta, \delta_B}^{N_B}(\gamma) \\ % 0 & \text{otherwise.} % \end{array} \right.\end{split}\]
Equation (17) (through Equation (18)) defines a linear operator \(A_{X,\gamma} : \mathbb{R}^\Omega \to \mathbb{R}^{I_{N_B}}\) that can synthesize a discrete projection \(p_{X,\gamma}\) from a discrete image \(u_X\).
Note: in the above description, we made explicit the parametrization of the \(A_{X,\gamma}\) operator by the magnetic field gradient \(\gamma\) but the operator is also implicitly parameterized by the discrete reference spectrum \(h_X\) and the sampling steps \(\delta_B\) and \(\delta\) since these parameters are involved in the formal definition of \(A_{X,\gamma}\).
Given a sequence made of N magnetic field gradient vectors \(\Gamma = (\gamma_1, \gamma_2, \dots, \gamma_N) \in (\mathbb{R}^d)^N\), we can stack the projections generated using each \(A_{X,\gamma_n}\) operator (for \(1 \leq n \leq N\)), in order to generate a sinogram, leading to
(19)\[s_{X,\Gamma} := A_{X,\Gamma} (u_X) := \big(A_{X,\gamma_1}(u_X), A_{X,\gamma_2}(u_X), \dots, A_{X,\gamma_N}(u_X)\big)\,.\]
Equation (19) defines another (and more general) linear operator that can synthesize a discrete sinogram \(s_{X,\Gamma}\) from a discrete image \(u_X\).
PyEPRI implementation : the \(A_{X,\Gamma}\)
operator is implemented in the pyepri.monosrc submodule of
the PyEPRI package, more precisely in the
pyepri.monosrc.proj2d() function (suited to 2D input images)
and the pyepri.monosrc.proj3d() function (suited to 3D input
images). Detailed and reproducible examples of use for the
pyepri.monosrc.proj2d() and pyepri.monosrc.proj3d()
functions are provided in the first two sections of this
tutorial.
Backprojection operator
We call backprojection operator the adjoint \(A_{\Gamma}^*\) of the projection operator \(A_{\Gamma}\). For any sequence of magnetic field gradient vectors \(\Gamma = (\gamma_1, \gamma_2, \dots, \gamma_N) \in (\mathbb{R}^d)^N\) and any discrete sinogram \(s = (p_1, p_2, \dots, p_N) \in \left(\mathbb{R}^{I_{N_B}}\right)^N\) gathering \(N\) projections, it satisfies,
(20)\[A_{X,\Gamma}^* (s) = \sum_{n = 1}^{N} A_{X,\gamma_n}^* (p_n)\,,\]
and, from (18), one can easily check that, for any \(n \in \{1, 2, \dots, N\}\), the adjoint of \(A_{X,\gamma_n}\) (also called backprojection operator) satisfies
(21)\[\forall k \in \Omega\,,\quad A_{X,\gamma_n}^* (p_n)(k) = \frac{\delta^d}{N_B} \sum_{\alpha \in \mathcal{C}_{\delta,\delta_B}^{N_B}(\gamma_n)} \overline{\mathrm{DFT}(h_X)(\alpha)} \, \mathrm{DFT}(p_n)(\alpha) \, e^{- \frac{2 i \pi \alpha \delta}{N_B \delta_B} \, \langle \gamma_n ,\, k\rangle }\,,\]
where \(\overline{z}\) denotes the complex conjugate of \(z \in \mathbb{C}\). The sum over \(\alpha\) involved in (21) corresponds to the adjoint of the \(\mathrm{NDFT}\) transform of an image over the nonuniform frequency nodes
\[\omega \in \left\{- \frac{2 \pi \alpha \delta}{N_B \delta_B} \gamma_n\,,~~ \alpha \in \mathcal{C}_{\delta, \delta_B}^{N_B}(\gamma_n) \right\}\]
applied to the restriction to \(\mathcal{C}_{\delta, \delta_B}^{N_B}(\gamma_n)\) of the signal \(\overline{\mathrm{DFT}(h_X)} \cdot \mathrm{DFT}(p_n)\). It can be efficiently and accurately evaluated using the FINUFFT package.
PyEPRI implementation: the backprojection operator
\(A_{X,\Gamma}^*\) is implemented in the
pyepri.monosrc submodule of the PyEPRI package, more
precisely in the functions pyepri.monosrc.backproj2d() (2D
setting) and pyepri.monosrc.backproj3d() (3D setting). We
refer to the two first sections of the dedicated tutorial for a detailed demonstration of theses
functions.
Fast evaluation of a projection-backprojection operation
In this section, we focus on the projection-backprojection operation, that is, the evaluation of the discrete image \(v_X := A_{X,\Gamma}^* \circ A_{X,\Gamma} (u_X)\) from the discrete image \(u_X\) and for a given sequence of magnetic field gradient vectors \(\Gamma = (\gamma_1, \gamma_2, \dots, \gamma_N) \in (\mathbb{R}^d)^N\). Using (19) and (20), one easily gets
(22)\[ A_{X,\Gamma}^* \circ A_{X,\Gamma} (u_X) = \sum_{n = 1}^{N} A_{X,\gamma_n}^* \circ A_{X,\gamma_n} (u_X)\,.\]
In the following, we shall denote be \(\Upsilon\) the augmented image domain \(\Upsilon := I_{2 N_1} \times \dots \times I_{2 N_d}\) (recall that the image domain is \(\Omega = I_{N_1} \times \dots \times I_{N_d}\)). Besides, injecting (18) into (21), one easily gets,
(23)\[\forall k \in \Omega\,,\quad A_{X,\gamma_n}^* \circ A_{X,\gamma_n} (u_X)(k) = \sum_{k' \in \Omega} u_X(k') \, \varphi_{\gamma_n}(k-k')\]
where
(24)\[\forall k^{\prime\prime} \in \Upsilon\,,\quad \varphi_{\gamma_n}(k^{\prime\prime}) = \frac{\delta^{2d}}{N_B} \sum_{\alpha \in \mathcal{C}_{\delta, \delta_B}^{N_B}(\gamma_n)} \overline{\mathrm{DFT}(h_X)(\alpha)} \, \mathrm{DFT}(h_X)(\alpha) \, e^{-\frac{2 i \pi \alpha \delta}{N_B \delta_B} \langle k^{\prime\prime} , \, \gamma_n \rangle}\,.\]
Finally, using (23) into (22), we get
(25)\[ \forall k \in \Omega\,,\quad A_{X,\Gamma}^* \circ A_{X,\Gamma} (u_X) = \sum_{k' \in \Omega} u_X(k') \, \varphi(k-k') \quad \text{where}\quad \varphi := \sum_{n=1}^{N} \varphi_{\gamma_n}\,.\]
We can recognize in (25) a convolution between \(u_X\) and \(\varphi\) (notice that the two signals have different domains, since the domain of \(u_X\) is \(\Omega\) and is strictly included into \(\Upsilon\), the domain of \(\varphi\)). Also, this means that the \(A_{X,\Gamma}^* \circ A_{X,\Gamma}\) operator exhibits a Toeplitz structure. For that reason, the convolution kernel \(\varphi\) will be referred from now as a Toeplitz kernel. An efficient way to evaluate the convolution between \(u_X\) and the Toeplitz kernel \(\varphi\) consists in
extending by zero the signal \(u_X\) from its initial domain \(\Omega\) towards the augmented domain \(\Upsilon\),
computing the circular convolution (that is, the convolution with periodical boundary condition) between this augmented image and the kernel \(\varphi\),
and then cropping the resulting signal to the initial image domain \(\Omega\).
The circular convolution mentioned in step 2. of this process can be efficiently evaluated using Fast Fourier Transforms of the involved signals. This numerical trick is well known and usually more efficient (in terms of computation time) than a direct evaluation of the sum (25) thanks to the linear logarithmic complexity of the FFT Algorihtm. However, this process is also memory consuming due to the use of two signals with extended domain \(\Upsilon\), so that this trick may not be suited to images with too large dimensions \((N_1, \dots, N_d)\).
It is important to note that the evaluation of \(A_{X,\Gamma}^* \circ A_{X,\Gamma} (u_X)\) using the procedure described above is usually much more faster than the successive evaluation of the \(A_{X,\Gamma}\) and \(A_{X,\Gamma}^*\) operators taken separately (that is the evaluation of \(s_{X,\Gamma} = A_{X,\Gamma} (u_X)\) followed by the evaluation of \(v_X = A_{X,\Gamma}^* (s_{X,\Gamma})\)). The ability to rapidly perform the projection-backprojection operation is of crucial importance in the implementation of iterative algorithms dedicated to EPR imaging.
PyEPRI implementation: the PyEPRI package provides functions to
compute the Toeplitz kernel \(\varphi\) and performing the fast
evaluation of the projection-backprojection (22). The
Toeplitz kernel \(\varphi\) can be computed using the function
pyepri.monosrc.compute_2d_toeplitz_kernel() in the 2D setting
and using the function
pyepri.monosrc.compute_3d_toeplitz_kernel() in the 3D
setting. Once the Toeplitz kernel is computed, the functions
pyepri.monosrc.apply_2d_toeplitz_kernel() and
pyepri.monosrc.apply_3d_toeplitz_kernel() can be used to
evaluate efficiently the projection-backprojection
\(A_{X,\Gamma}^* \circ A_{X,\Gamma} (u_X)\) in the 2D and 3D
settings. Detailed examples of computation and use of Toeplitz kernels
are available in the two first sections of this tutorial.
Multisources operators
Modeling
We will consider now a sample made of multiple EPR sources. We denote by \(\mathcal{X} = (X_1, X_2, \dots, X_K)\) the EPR sources contained into the sample to be imaged. We will again describe the projection process in the continuous domain before focusing on the discrete setting and the associated operators. For any \(j \in \{1,2,\dots, K\}\), let
\(h_{X_j}^c : \mathbb{R} \to \mathbb{R}\) denote the reference spectrum of the \(j\)-th EPR source \(X_j\);
\(U_{X_j}^c : \mathbb{R}^d \mapsto \mathbb{R}\) denote the concentration mapping of the \(j\)-th EPR source \(X_j\).
We shall also denote by \(U_{\mathcal{X}}^c := \big(U_{X_1}^c, U_{X_2}^c, \dots, U_{X_K}^c \big)\) the sequence gathering all mono-source concentration mappings.
In presence of a magnetic field gradient \(\gamma = \mu \cdot e_\theta \in \mathbb{R}^d\), the EPR projection acquired from the mixture \(\mathcal{X}\) of EPR sources is modeled as the signal \(P_{\mathcal{X},\gamma}^c : \mathbb{R} \to \mathbb{R}\) defined by
\[\forall B\in\mathbb{R}\,,\quad P_{\mathcal{X},\gamma}^c(B) = \sum_{j = 1}^{K} \big(h_{X_j}^c * \mathcal{R}_{\theta}^{\mu}(U_{X_j}^{c})\big)(B)\,,\]
According to this (linear) modeling, we can see that the projection \(P_{\mathcal{X},\gamma}^c\) is simply obtained by summing the contributions of all individual EPR sources.
Filtering and sampling the continuous signals as we did in the single-source framework yields their discrete counterparts, that are,
\(h_{X_j} : I_{N_B} \to \mathbb{R}\), the discrete reference spectrum associated to the \(j\)-th EPR source \(X_j\), that corresponds to the sampling of reference spectrum \(h_{X_j}^c\) (filtered by \(g_{\delta_B}\)) with sampling step \(\delta_B\);
\(u_{X_j} : \Omega_j \to \mathbb{R}\) the discrete concentration mapping of the \(j\)-th EPR source \(X_j\), corresponding to the sampling of the image \(U_{X_j}^c\) (filtered by \(f_\delta\)) with step \(\delta\) along each coordinate axis (where \(\Omega_j := I_{N_1^{(j)}} \times I_{N_2^{(j)}} \times \dots I_{N_d^{(j)}}\) represents the discrete domain with dimensions \((N_i^{(j)})_{1 \leq i \leq d}\) of the \(j\)-th EPR source image \(u_j\));
\(u_{\mathcal{X}} = \big(u_{X_1}, u_{X_2}, \dots, u_{X_K}\big)\), the sequence of discrete images gathering the discrete concentration mappings of all EPR sources present in the sample.
By summing the contributions of all different sources, we obtain the discrete projection \(p_{\mathcal{X},\gamma} : I_{N_B} \to \mathbb{R}\) defined by
(26)\[ p_{\mathcal{X},\gamma} = \sum_{j = 1}^K A_{X_j, \gamma}(u_{X_j})\,,\]
and that corresponds (up to modeling and approximation errors involved in the sampling process) to the sampling of \(\mathcal{P}_{\mathcal{X},\gamma}^c\) with sampling step \(\delta_B\) over the range \(B \in B_{cf} + \left[-\frac{B_{sw}}{2}, \frac{B_{sw}}{2}\right]\).
When a sequence \(\Gamma = \big(\gamma_1, \gamma_2,\dots, \gamma_N\big) \in \big(\mathbb{R}^d\big)^N\) of magnetic field gradient vectors is available, a discrete sinogram \(s_{\mathcal{X}, \Gamma} = (p_{\mathcal{X},\gamma_1}, p_{\mathcal{X},\gamma_2}, \dots, p_{\mathcal{X},\gamma_N}) \in (\mathbb{R}^{I_{N_B}})^N\) can be obtained using
(27)\[ s_{\mathcal{X},\Gamma} = \left( A_{\mathcal{X}, \gamma_1} (u_{\mathcal{X}}) , A_{\mathcal{X}, \gamma_2} (u_{\mathcal{X}}), \dots, A_{\mathcal{X}, \gamma_N} (u_{\mathcal{X}})\right)\,,\]
which simply stacks together the projections \(\left(A_{\mathcal{X}, \gamma_1}(u_{\mathcal{X}})\right)_{1 \leq n \leq N}\).
Projection operator
Equation (26) provides an explicit way to synthesize a projection from a sequence of multiple EPR sources. Formally, let us define the multisources projection operator \(A_{\mathcal{X},\gamma} : \mathbb{R}^{\Omega_1} \times \mathbb{R}^{\Omega_2} \times \dots \times \mathbb{R}^{\Omega_K} \to \mathbb{R}^{I_{N_B}}\) by
(28)\[\forall u = \big(u_1, u_2, \dots, u_K\big) \in \mathbb{R}^{\Omega_1} \times \mathbb{R}^{\Omega_2} \times \dots \times \mathbb{R}^{\Omega_K}\,,\quad A_{\mathcal{X},\gamma}(u) = \sum_{j = 1}^K A_{X_j, \gamma}(u_j)\,.\]
Considering now a sequence \(\Gamma = (\gamma_1, \gamma_2, \dots, \gamma_{N}) \in \big(\mathbb{R}^d\big)^N\) of field gradient vectors, the projection operator \(A_{\mathcal{X},\gamma}\) can be generalized into \(A_{\mathcal{X},\Gamma} : \mathbb{R}^{\Omega_1} \times \mathbb{R}^{\Omega_2} \times \dots \times \mathbb{R}^{\Omega_K} \mapsto (\mathbb{R}^{I_{N_B}})^N\) using, for any \(u = \big(u_1, u_2, \dots, u_K\big) \in \mathbb{R}^{\Omega_1} \times \mathbb{R}^{\Omega_2} \times \dots \times \mathbb{R}^{\Omega_K}\),
(29)\[A_{\mathcal{X},\Gamma}(u) = \left(A_{\mathcal{X},\gamma_1}(u) , A_{\mathcal{X},\gamma_2}(u) , \dots, A_{\mathcal{X},\gamma_N}(u) \right)\,.\]
The operator \(A_{\mathcal{X},\Gamma}\) can be used to generate a discrete sinogram from a sequence of multiple EPR source images.
PyEPRI implementation : the
\(A_{\mathcal{X},\Gamma}\) operator is implemented
into the pyepri.multisrc submodule of the PyEPRI package,
more precisely in the pyepri.multisrc.proj2d() function
(suited to sequences of 2D input images) and the
pyepri.multisrc.proj3d() function (suited to sequences of 3D
input images). Detailed and reproducible examples of use for the
pyepri.multisrc.proj2d() and
pyepri.multisrc.proj3d() functions are provided in the last
two sections of this tutorial.
Backprojection operator
In the multisources setting, we call backprojection operator the adjoint \(A_{\mathcal{X},\Gamma}^*\) of the projection operator \(A_{\mathcal{X},\Gamma}\). We can show that, for any \(s = (p_1, p_2, \dots, p_N) \in (\mathbb{R}^{I_{N_B}})^N\), we have
(30)\[A_{\mathcal{X}, \Gamma}^* (s) = \sum_{n=1}^{N} A_{\mathcal{X}, \gamma_n}^* (p_n)\,,\]
where
(31)\[A_{\mathcal{X}, \gamma_n}^* (p_n) = \left( A_{X_1, \gamma_n}^* (p_n), A_{X_2, \gamma_n}^* (p_n), \dots, A_{X_K, \gamma_n}^* (p_n) \right) = \left( A_{X_m, \gamma_n}^* (p_n) \right)_{1 \leq m \leq K}\,,\]
is simply obtained by stacking the mono-source backprojection operators \(A_{X_j,\gamma_n}^*\) defined in Fourier domain in (21).
PyEPRI implementation: the multisources backprojection operator
\(A_{\mathcal{X},\Gamma}^*\) is implemented in the
pyepri.multisrc submodule of the PyEPRI package, more
precisely in the functions pyepri.multisrc.backproj2d() (2D
setting) and pyepri.multisrc.backproj3d() (3D setting). We
refer to the two last sections of the dedicated tutorial for a detailed demonstration of theses
functions.
Fast evaluation of a projection-backprojection operation
Let us focus on the projection-backprojection operation in the multisources setting. Let \(u = (u_1, u_2, \dots, u_K) \in \mathbb{R}^{\Omega_1} \times \mathbb{R}^{\Omega_2} \times \dots \times \mathbb{R}^{\Omega_K}\), let \(\Gamma = (\gamma_1, \gamma_2, \dots, \gamma_N) \in (\mathbb{R}^d)^N\). Thanks to (29) and (30), we have
(32)\[A_{\mathcal{X},\Gamma}^* \circ A_{\mathcal{X},\Gamma}(u) = \sum_{n = 1}^N A_{\mathcal{X},\gamma_n}^* \circ A_{\mathcal{X},\gamma_n}(u)\,.\]
Besides, from (28), (29) and (31), for any \(n \in \{1, 2, \dots, N\}\), we have
(33)\[A_{\mathcal{X},\gamma_n}^* \circ A_{\mathcal{X},\gamma_n}(u) = \left( \sum_{j = 1}^K A_{X_m, \gamma_n}^* \circ A_{X_j, \gamma_n}(u_j)\right)_{1 \leq m \leq K}\,.\]
Then, using (18) and (21), one gets,
(34)\[\forall k\in\Omega\,,\quad \left(A_{X_m, \gamma_n}^* \circ A_{X_j, \gamma_n}(u_j)\right)(k) = \sum_{k'\in\Omega} u_j(k') \, \psi_{m,j,\gamma_n}(k-k')\,,\]
where, for all \(k^{\prime\prime} \in \Upsilon\), we have set
(35)\[\psi_{m,j,\gamma_n}(k^{\prime\prime}) = \frac{\delta^{2d}}{N_B} \sum_{\alpha \in C_{\delta,\delta_B}^{N_B}(\gamma_n)} \overline{\mathrm{DFT}(h_{X_m})(\alpha)} \, \mathrm{DFT}(h_{X_j})(\alpha) \, e^{-\frac{2 i \pi \alpha \delta}{N_B \delta_B} \langle k^{\prime\prime} , \gamma_n \rangle}\,.\]
Using (34) into (33) and then into (32), we end up with
(36)\[ \forall k\in\Omega\,,\quad A_{\mathcal{X},\Gamma}^* \circ A_{\mathcal{X},\Gamma}(u)(k) = \left( \sum_{j = 1}^{K} \sum_{k'\in\Omega} u_j(k') \, \psi_{m,j}(k-k') \right)_{1 \leq m \leq K}\]
where \(\psi_{m,j}\) is defined by
(37)\[\psi_{m,j} = \sum_{n=1}^{N} \psi_{m,j,\gamma_n}\]
and will be referred as the Toeplitz kernel of the cross sources \((m,j)\). The cross sources Toeplitz kernels \(\left(\psi_{m,j}\right)_{1 \leq (m,j) \leq K}\) can be efficiently evaluated using the FINUFFT package.
Each term \(\sum_{k'\in\Omega} u_j(k') \, \psi_{m,j}(k-k')\) in (36) corresponds to the convolution between the \(j\)-th source image \(u_j\) and the kernel \(\psi_{m,j}\) defined in (37). Again, such convolution operation can be evaluated efficiently (using circular convolutions) provided by we extend by zero the signal image \(u_j\) over the augmented domain \(\Upsilon_j := I_{2 N_1^{(j)}} \times I_{2 N_2^{(j)}} \times \dots \times I_{2 N_d^{(j)}}\), allowing finally the fast evaluation of \(A_{\mathcal{X},\Gamma}^* \circ A_{\mathcal{X},\Gamma}(u)\) using \(K^2\) convolutions.
PyEPRI implementation: the PyEPRI package provides functions to
compute the cross sources Toeplitz kernels
\(\left(\psi_{m,j}\right)_{1 \leq (m,j) \leq K}\) and performing
the fast evaluation of the projection-backprojection
(32). The cross sources Toeplitz kernels
\(\left(\psi_{m,j}\right)_{1 \leq i,j \leq K}\) can be computed
using the function
pyepri.multisrc.compute_2d_toeplitz_kernels() in the 2D
setting and using the function
pyepri.multisrc.compute_3d_toeplitz_kernels() in the 3D
setting. Once the cross sources Toeplitz kernels are computed, the
functions pyepri.multisrc.apply_2d_toeplitz_kernels() and
pyepri.multisrc.apply_3d_toeplitz_kernels() can be used to
evaluate efficiently the projection-backprojection
\(A_{\mathcal{X},\Gamma}^* \circ A_{\mathcal{X},\Gamma} (u_X)\) in
the 2D and 3D settings. Detailed examples of computation and use of
Toeplitz kernels are available in the two last sections of this
tutorial.
Spectral-spatial operators
Modeling
We will consider from now a spectral-spatial image \(U^c : \mathbb{R}^d \times \mathbb{R} \to \mathbb{R}\), such that, for all spatial position \(x \in \mathbb{R}^d\), the monodimensional function \(B \mapsto U^c(x,B)\) represents the EPR spectrum of the paramagnetic species located at the spatial position \(x\). As we did above, we shall consider a field gradient vector \(\gamma \in \mathbb{R}^d\), and denote by \(\mu\) its amplitude and by \(e_\theta \in \mathbb{R}^d\) the unit vector parameterized by an angle \(\theta \in \mathbb{R}^{d-1}\) representing its direction (recall the conventions here), i.e., such that
Denoting by \(L\) the smallest diameter of a sphere enclosing the sample placed inside the spectrometer cavity (or enclosing the cavity itself if the sample extends beyond the resonant cavity), and denoting again by \(B_{\mathrm{sw}}\) the acquisition sweep-width, we define a so-called spectral angle \(\varphi\) using
In the following, we assume that the sample is fully included into the field of view (FOV) domain, which is the centered ball with diameter \(D_\mathrm{fov}(\mu) = \frac{B_{\mathrm{sw}}}{\mu}\), leading to \(L \leq \frac{B_{\mathrm{sw}}}{\mu}\). Consequently, we have \(\tan{\left(\varphi\right)} \in [0,1]\), and thus, the spectral angle \(\varphi\) satisfies
In the following, we shall also consider the \((d+1)\)-dimensional unit vector
which is collinear to the line with direction \((\theta, \varphi)\) in the \((d+1)\)-dimensional spatial-spectral space (endowed with the \((d+1)\)-dimensional hyperspherical coordinate system).
We will denote by \(V^c\) the (spatial) rescaling by the factor \(\frac{B_\mathrm{sw}}{L}\) of the spectral-spatial image \(U^c\), that is, the function defined by
Last, we will denote by \(\mathcal{R}_{\theta,\varphi}(V^c)\) the Radon transform of the rescaled spectral-spatial image \(V^c\) in the direction \(e_{\theta,\varphi}\), that is, the signal defined by
denoting again by \(\delta_*\) the Dirac mass.
We will now describe in detail the projection and backprojection operations associated with spectral-spatial signals. As we did previously, we will describe the projection operator in the continuous framework before moving on to the discrete case. Also, as we did previously, we will detail the calculation of a single projection with field gradient \(\gamma\) (with amplitude \(\mu\), angle \(\theta\), and spectral-spatial angle \(\varphi\) implicitly depending on this field vector \(\gamma\), as described above). Then we will generalize to the acquisition of multiple projections (sinogram) obtained with different field gradients vectors.
Projection operator
Continuous setting
Let \(\mathcal{P}^c_\gamma : \mathbb{R} \to \mathbb{R}\) be the projection signal measured in presence of the field gradient \(\gamma\), we have
Recall that \(\cos(\varphi)\neq 0\) because of (38). Let \(B \in \mathbb{R}\), we have
The above result (41) provides an explicit link between the projection \(\mathcal{P}_\gamma^c\) signal and the Radon transform of the rescaled image \(V^c : (x',B') \mapsto \left( \frac{L}{B_\mathrm{sw}} \right)^d \cdot U^c\left(- \tfrac{L}{B_\mathrm{sw}} x', B'\right)\). By moving into the Fourier domain, we can obtain an even more explicit link between \(\mathcal{P}_\gamma^c\) and \(U^c\). Indeed, we show below that
To prove this result, we shall use Fourier Slice Theorem (see e.g. [Nat01]). In the spectral-spatial framework, it states that, given any spectral-spatial function \(f:\mathbb{R}^d \times \mathbb{R} \to \mathbb{R}\), we have
Now, let \(\xi \in \mathbb{R}\), based on the above, we have
using the standard Fourier transform rescaling property \(\mathcal{F}\left(| a | \cdot g(a\,\cdot)\right)(\xi) = \mathcal{F}(g)(\xi/a)\) (for any integrable function \(g : \mathbb{R} \to \mathbb{R}\), for any rescaling parameter \(a \neq 0\), and for any frequency position \(\xi \in \mathbb{R}\)).
Thus, from Fourier Slice Theorem, we get
because \(e_{\theta,\varphi} = \left(\sin(\varphi)\,e_\theta, \cos(\varphi)\right)\). Using again Fourier transform rescaling properties, and recalling that \(\gamma = \mu\, e_\theta = \tfrac{B_\mathrm{sw}}{L}\, \tan{(\varphi)}\, e_{\theta}\), we end up with
which terminates the proof.
Discretization
Equation (42) provides an explicit links in the continuous setting between the Fourier transform of the projection \(\mathcal{P}_\gamma^c\) and that of the spectral-spatial image \(U^c\). Let us now discretize the projection (with step \(\delta_B\)) and the spectral-spatial image (with step \(\delta\) along the spatial axes and with step \(\delta_B\) along the spectral axis) as we did earlier. Let the discrete projection \(p_\gamma : I_{N_B} \to \mathbb{R}\) and the discrete spectral-spatial image \(u : \Omega \times I_{N_B} \to \mathbb{R}\) be the discrete signals defined by
where \(\widetilde{\mathcal{P}_\gamma^c} = g_{\delta_B} * \mathcal{P_\gamma^c}\) and \(\widetilde{U^c} = \left((x,B)\mapsto f_{\delta}(x) \cdot g_{\delta_B}(B)\right) * U^c\) denote the appropriately filtered (relatively to the required sampling steps) versions of the continous projection \(\mathcal{P}_\gamma^c\) and continous spectral-spatial image \(U^c\) (see the cutband filters definitions in (9) and (11)). Using the same discretization framework as in [ABDF23], we can exhibit a link between the discrete Fourier coefficients of those two discrete signals, that is,
We recall that the definition of the discrete frequency support \(C_{\delta,\delta_B}^{N_B}(\gamma)\) was given in (15).
Neglecting the approximation errors in (43), we get an explicit relation
where \(A_\gamma\) is the discrete spectral-spatial projection operator defined in the Fourier domain by
If we consider now a sequence of field gradient vectors \(\Gamma = (\gamma_1,\gamma_2,\dots,\gamma_N) \in \left(\mathbb{R}^d\right)^N\), the sequence \(p_\Gamma := (p_{\gamma_1}, p_{\gamma_2}, \dots, p_{\gamma_N})\) of measured discrete projections can be linked to the discrete spectral-spatial image \(u\) by stacking the individual projection operators, leading to
PyEPRI implementation : the spectral-spatial projection operator
\(A_{\Gamma}\) is implemented in the
pyepri.spectralspatial submodule of the PyEPRI package,
currently for \(d = 3\) (that is, for 4D spectral-spatial images,
with \(d = 3\) spatial dimensions and one spectral
dimension). More precisely, the projection operator \(A_\Gamma\)
is implemented in the
pyepri.spectralspatial.proj4d(). Implementation in the case
\(d = 2\) (that is, for 3D spectral-spatial images with
\(d=2\) spatial dimensions and one spectral dimension) will be
added in a future release.
Backprojection operator
As done previously, we will call (spectral-spatial) backprojection operator the adjoint \(A_\Gamma^*\) of the (spectral-spatial) projection operator \(A_\Gamma\). Due to the stacked structure of \(A_\Gamma\) (which stacks the \(A_{\gamma_j}\) operators), we easily get that, for any discrete sequence \(s_\Gamma := (p_1, p_2, \dots, p_N) \in \left(\mathbb{R}^{I_{N_B}}\right)^N\), we have
where \(A_{\gamma_n}^*\) denotes the adjoint of the \(A_{\gamma_n}\) (spectral-spatial) projection with field gradient \(\gamma_n\) operator. Besides, from (44) and (45), one can easily prove that, for any \(n \in \{1, 2, \dots, N\}\), we have
Finally, by injecting (48) into (47) we end up with the explicit mathematical description of the spectral-spatial backprojection, that is, for all \(k\in \Omega\) and for all \(\ell \in I_{N_B}\),
PyEPRI implementation : the spectral-spatial backprojection
operator \(A_{\Gamma}^*\) is implemented in the
pyepri.spectralspatial submodule of the PyEPRI package,
currently for \(d = 3\) (that is, for 4D spectral-spatial images,
with \(d = 3\) spatial dimensions and one spectral
dimension). More precisely, the backprojection operator
\(A_\Gamma^*\) is implemented in the
pyepri.spectralspatial.backproj4d(). Implementation in the
case \(d = 2\) (that is, for 3D spectral-spatial images with
\(d=2\) spatial dimensions and one spectral dimension) will be
added in a future release.
Fast evaluation of a projection-backprojection operation
Let \(u : \Omega\times I_{N_B}\to \mathbb{R}\) be a discrete spectral-spatial image, and let \(\Gamma = (\gamma_1, \gamma_2, \dots, \gamma_N) \in \left(\mathbb{R}^d\right)^N\) be a sequence of field gradient vectors. We show below that, forall \(k\in\Omega\) and for all \(\ell \in I_{N_B}\), we have
where we have set
for all \(k^{\prime\prime} \in \Upsilon\) (recall that \(\Upsilon = I_{2 N_1} \times I_{2 N_2} \times \dots \times I_{2 N_d}\) represents an augmented spatial domain) and for all \(\ell^{\prime\prime} \in I_{2N_B}\) (augmented spectral domain).
Let \(k \in \Omega\) and let \(\ell \in I_{N_B}\), by combining (49) and (46), we get
Equation (50) shows that \(A_\Gamma^* \circ A_\Gamma (u)\) corresponds to the convolution between the spectral-spatial image \(u\) and the kernel \(\varphi\) defined in (51). As explained earlier, such convolution operation can be evaluated efficiently (using circular convolutions) provided that we extend by zero the image \(u\) over the augmented spectral-spatial domain \(\Upsilon \times I_{2 N_B}\), allowing finally the fast evaluation of \(A_{\Gamma}^* \circ A_{\Gamma}(u)\) as a product in the (discrete) Fourier domain.
PyEPRI implementation: the PyEPRI package provides functions to
compute the spectral-spatial Toeplitz kernel \(\varphi\)
(currently for \(d = 3\), that is, for 4D spectral-spatial images,
with \(d = 3\) spatial dimensions and one spectral
dimension). More precisely, the spectral-spatial Toeplitz kernel
\(\varphi\) can be computed using the
pyepri.spectralspatial.compute_4d_toeplitz_kernel()
function. The efficient evaluation of the spectral-spatial
projection-backprojection operation \(A_\Gamma^*\circ
A_\Gamma(u)\) using the precomputed spectral-spatial Toeplitz kernel
\(\varphi\) can be done using the
pyepri.spectralspatial.apply_4d_toeplitz_kernel()
function. Similar functions in the case \(d = 2\) (that is, for 3D
spectral-spatial images with \(d=2\) spatial dimensions and one
spectral dimension) will be added in a future release.